ニュース
なぜトヨタ自動車はヒューマノイドロボットを開発するのか【トヨタ自動車】
2019年12月13日
 T-HR3というロボットをご存知だろうか。
T-HR3というロボットをご存知だろうか。
トヨタが2017年に発表したヒューマノイド(人型)ロボットだ。
ロボットとそれを操る操縦者(マスター操縦システム)からなり、ロボットが外から受けた力を遠隔地の操縦者と共有したり、操縦者の分身のように同じ動きができる。この度さらにT-HR3のできることが増えたという。
まずは下の映像をご覧いただきたい。
今回の進化点は映像中1:40以降に紹介
確かに従来よりも難易度の高い作業や自然な歩行操作ができるようになっている。
今回の進化のポイント、そしてトヨタがヒューマノイドロボット開発を通じて目指す未来について、T-HR3開発チームリーダーの森平智久さんに駆け出し広報担当が話を聞いた。
 T-HR3開発チームリーダー 森平智久さん
T-HR3開発チームリーダー 森平智久さん
森平さん率いるヒューマノイドロボットGの開発拠点はトヨタ東京本社内にある。
T-HR3だけでなく東京2020組織委員会と共同で東京2020マスコットロボット(以下、マスコットロボット)の開発も手掛けている。
 T-HR3の進化点
広報担当 : TY
T-HR3の進化点
広報担当 : TY
今日はよろしくお願いします。
早速ですが、今回具体的にT-HR3のどこが進化したのですか。
森平さん
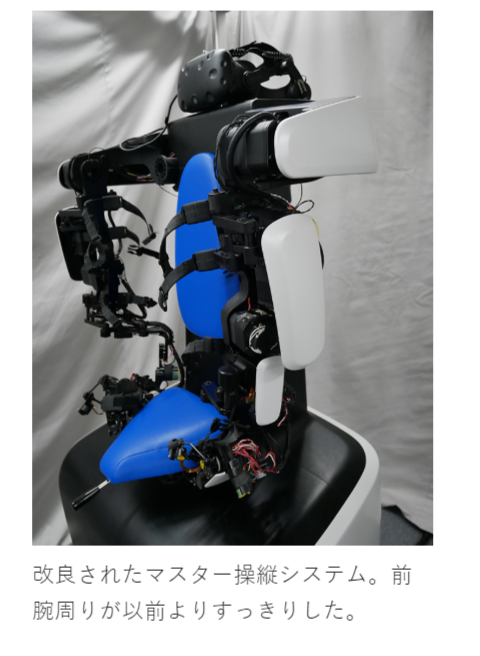
最大の進化点は、それぞれの指でより細かい作業がこなせるようになる「マスターハンド」をマスター操縦システムに追加したことです。マスター操縦システムは腕部や脚部の軽量化にも取り組み操縦者がより軽やかに操縦することが可能になりました。
T-HR3(ロボット)側も小さな機能追加を実施しました。
TY
つまり、ロボットの指先が器用になり、操縦者側は以前よりも操縦しやすくなったということですか?
森平さん
はい。説明するよりも体感してもらった方が早いと思いますので、どうぞマスター操縦システムを装着してください。
TY
え。
 初めてマスター操縦システムを装着。未来が見える。
初めてマスター操縦システムを装着。未来が見える。
TY
ロボットを操縦するなんて初めての体験なのでドキドキです!ウェアラブル装置自体にはそれほど重さは感じませんし、何よりかっこいいですね。
森平さん
似合っていますよ。ではまずは腕を動かしてみてください。ゴーグル内にも映るロボットも同じ腕の動きをしているのがわかると思います。

TY
本当だ、ロボットが自分とほぼ同時に同じ動きをしています。これまで味わったことのない感覚です。
森平さん
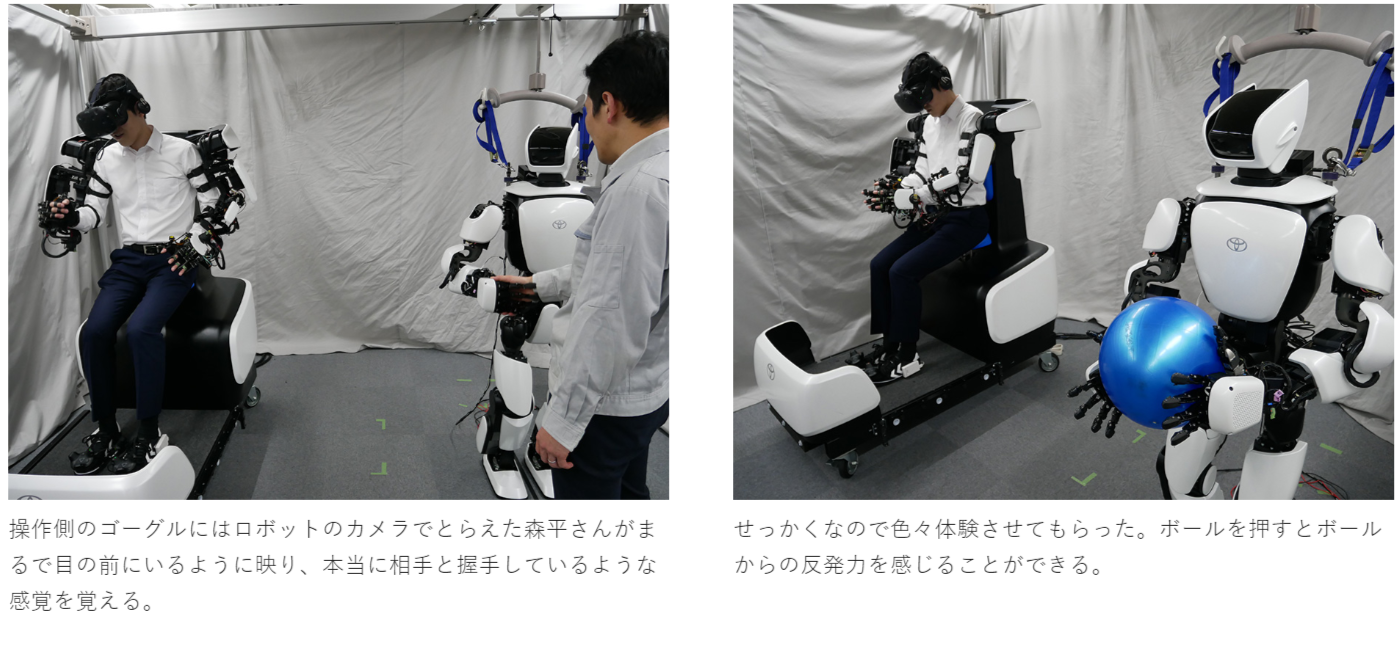
握手をしてみましょうか。
TY
指一本一本まで触れている感覚があります。まるで自分の指みたいです。腕が揺れる感覚も握手そのもので面白い…
森平さん
従来モデルではここまで正確に各指の力を伝えることができなかったのですが、今回の改良で、以前よりも繊細な、例えば「コインをつまみあげる」などの作業もできるようになりました。
森平さん
では続いて歩いてみましょうか。
TY
はい!あ、初めてでも自然に歩行できる。まだ自分で歩くほどの自由さはありませんが、直感的に操作できます。それにしてもこの不思議な感覚を誰かに伝えたいです!座って足を前に出しているだけなのに歩けていますし、方向転換もできます。
森平さん
操縦者は立って実際に歩行しても同じ仕組みで動かすことができます。操縦者にはできるだけ直感的に歩行指示をしてもらい、ロボット側でバランスをとりつつ指示通りに歩行できるよう工夫しています。

TY
ロボットと操縦システム、両方の開発を同時に進めていく必要があるのですね。
森平さん
はい。将来のサービス提供を考えた時にロボットはもちろんのこと、どなたでも少ない負担で操縦できることが重要になりますので。
TY
(将来のサービス提供。気になるワードが出てきた。)
なぜトヨタがヒューマノイドロボットを?
TY
T-HR3の進化点はよくわかりました。しかし、改めてなぜヒューマノイドロボットの開発を始めたのですか。
森平さん
将来のロボットの広がりを考えた時に、多数の関節をうまく使いながら繊細な作業をしたり、多少の衝撃を受けても安全に作業を継続できるロボットの需要が増してくると考えました。
課題は多いですが、将来このような『冗長自由度』を持つロボットが必要になると考え、その典型的な形態であるヒューマノイドロボットの開発に取り組みました。
TY
…すみません。冗長自由度ってなんですか。
森平さん
一つの作業に対して必要最低限の自由度に加え余剰な自由度を持つことです。
例えば、より多くの関節を持つロボットアームは、もしどこか1か所の関節がトラブルで動かなくても、残りがカバーしながら作業を続けることができます。さらに弱点を補うことに加え、余剰の自由度を持つことで、モノの取り方一つにも下からすくい上げるように、あるいは横から取る等個人の性格やスキルによってロボットの動き方にも多様性がでるという面白さがあります。
TY
何かあった時のバックアップ、余裕というイメージでしょうか。冗長自由度の特徴や大切さはわかりました。ただ、そのロボットが人型である必要があるのでしょうか。
森平さん
人型の利点は、人と同じ道具や環境が使えるなどと言われてきましたが、もう1つ人型にする大きな理由は、最も人が操作しやすいカタチであることにあります。
今だって初めてマスター操縦システムを使ったにもかかわらず特別な練習なしに直感的に動かしていましたよね。
 TY
TY
…はっ!確かに…
森平さん
すでにVR技術を使って、自分の身体の動きを自然にバーチャルの世界でも反映できる感覚を味わったことのある人もいらっしゃるでしょう。T-HR3のように実体を持つアバターロボットは、VRの世界を飛び出して現実の世界に物理的な影響を与えることができます。
将来遠方にいるアバターロボットと、人の動きや感覚を共有する、こうしたバーチャルな移動サービスの形を提供したいと考えています。これは今後モビリティカンパニー変革を目指すトヨタに相応しいテーマだと考えます。
TY
トヨタがヒューマノイドロボット開発に取り組む理由は、「新しい移動サービスの提供」なのですね。
コラム : 移動サービス
2018年1月のCESで社長の豊田が「トヨタは世界中のすべてのお客様に『移動』に関わるサービスを提供するモビリティカンパニーになる」と宣言しましたが、これはロボットにとっても例外ではありません。トヨタのロボットが提供したい移動サービスは大きく3種類あります。一つは人やモノが実際に動く『物理的な移動』。続いてアバターやエージェントなどを介し、自分の一部分もしくは全体を仮想的に遠隔地に移動させる『バーチャルな移動』の提供です。まさにT-HR3がこれにあたります。最後の「移動」は、上記のような移動支援による新たな体験や出会いから生まれる人の気持ちの動き“moved”、すなわち『感動』です。トヨタではこれら3つの移動の提供を目指し、それぞれのチームがロボット開発にあたっています。

すべての人が生きがいを感じられる社会へ
TY
新しい移動サービスの提供、非常にワクワクします。最後に今後の課題や展望を聞かせてください。
森平さん
やはり大きな課題は、冗長自由度の更なる有効活用と軽量な操縦装置の開発です。できるだけ早く実現できるようチーム一丸で努力します。
将来的には、今までにない移動体験で一人でも多くの方にワクワクしていただきたいですし、それだけでなく、たとえば今後少子高齢化の加速により介護の問題等が深刻化した時にこのロボット技術により介護者の物理的な障害となる移動時間を無くし、ロボットを通じたコミュニケーションを実現する、あるいは現在介護を受けている方も自分でできることが増える、すなわち今持っている機能を拡張することができるかもしれません。
私たちの技術開発を通じてすべての人が自分の時間を最大限有効活用し、活き活きとした生活を送ることができるよう支援したいと考えています。
これからのトヨタのパートナーロボットの成長にぜひご期待ください。今日はありがとうございました。
TY
ありがとうございました!
おわりに : 国際ロボット展への出展
 12/18(水)-21(土)まで東京ビッグサイトで開催される2019国際ロボット展に、機能向上したT-HR3とマスコットロボットが出展される。マスコットロボットについては、T-HR3よりもう一回り小さな人形サイズのボディに多くの先進技術を盛り込んでいる。
12/18(水)-21(土)まで東京ビッグサイトで開催される2019国際ロボット展に、機能向上したT-HR3とマスコットロボットが出展される。マスコットロボットについては、T-HR3よりもう一回り小さな人形サイズのボディに多くの先進技術を盛り込んでいる。
また運がよければロボットと握手をする機会もあるそうだ。
ぜひT-HR3、マスコットロボット、そして開発チームに会いにトヨタブースにお越しいただきたい。

トヨタ自動車株式会社ホームページはこちら




