ニュース
東京ロボティクス、研究開発者向けのアーム・ハンド一体型マニピュレータ『Torobo Arm-Hand System』の販売開始
2022年11月15日
東京ロボティクス、研究開発者向けのアーム・ハンド一体型マニピュレータ『Torobo Arm-Hand System』の販売開始
高度な物体操作の研究に最適!
最先端ロボットにより効率的な社会の実現を目指す東京ロボティクス株式会社(東京都文京区、代表取締役:坂本義弘)は、力制御ロボットアームと多指ハンドを一体化させた『Torobo Arm-Hand System』の販売を開始しました。
近年、ロボットアームとロボットハンドを組みわせて物体を操る研究が盛んに行われています。しかし、多くの場合、研究者自身が既製品のアームとハンドを別々に購入して組み合わせたロボットを使用しており、ハードウェアのバランス(可動域、可搬重量、見た目等)や制御のリアルタイム性に難点がありました。また、力覚(関節トルク)を精度よく取得できるアームや、触覚センサが付いた多軸・多指ハンドの製品も世の中に決して多くないため、機械学習等を用いた高度な物体操作に関する研究の障害になっていました。こうした現状を打開すべく、この度『Torobo Arm-Hand System』をリリース致しました。
2023年7月に最初の出荷を予定しており、2023年9月までにご購入いただけるお客様には特別価格を適用させていただきます。お急ぎのお客様に対しては、β版のハンド(親指3軸、その他各指1軸)を用いたロボットであれば年内の発注で2023年3月末までに納品可能ですので、その旨お問い合わせ下さい。
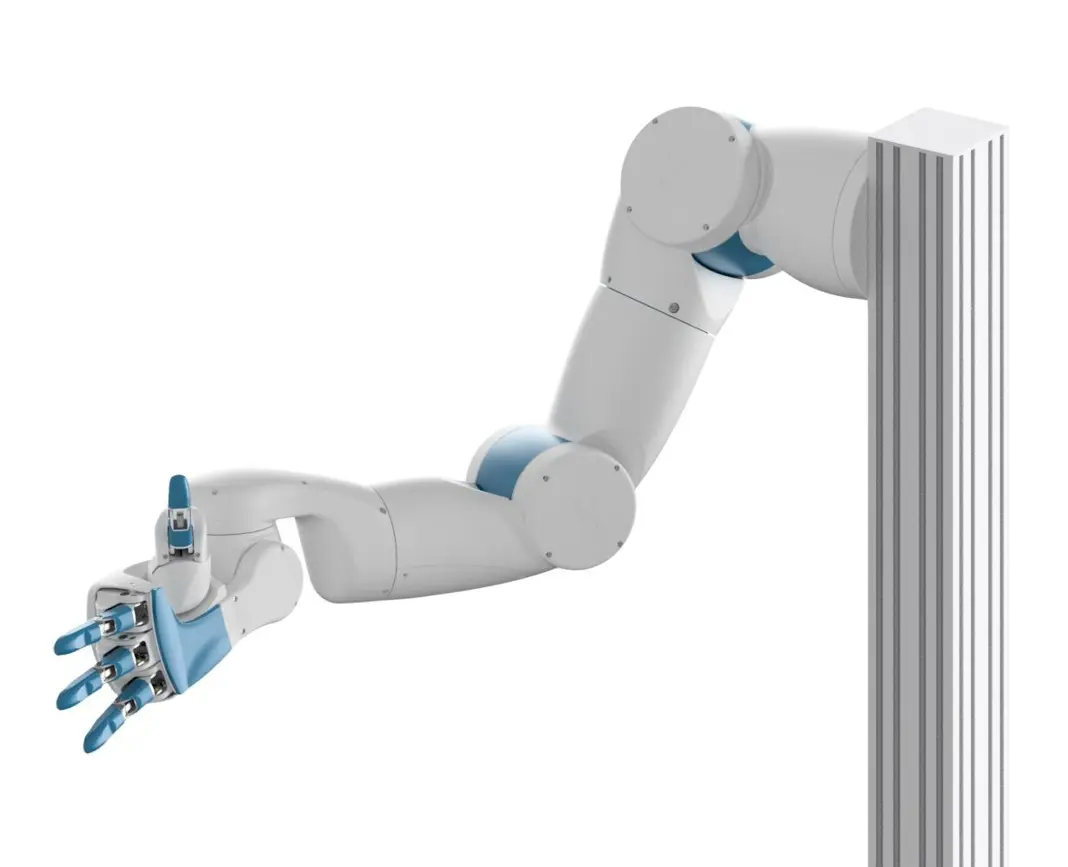
■外観
|
■アーム部仕様
・全関節トルクセンサ装備
・軸構成:7軸ストレート型(R, P, R, P, R, P, R)
・リーチ:690 mm(取付底面からアーム先端フランジ面まで)
・可搬重量:8 kg(最悪姿勢保持時)
・繰り返し精度:±0.05 mm 程度
・本体重量:23 kg
・取得データ:関節角度・速度・加速度・トルク、手先6軸推定力
・関節インピーダンス制御、手先インピーダンス制御(インピーダンスパラメータ変更可能)
■ハンド部仕様
・指数:4指
・モータ軸数:10軸(親指:3軸、その他各指:2軸、親指以外の指の一括開閉1軸)
・最大力:15 N(最大開き時)
・FSRセンサ数:掌3枚、各指先端4枚
・本体重量:約2.5 kg
・右手・左手選択可能
■共通部仕様
・制御コントローラPC付属(アーム・ハンド共通)
・DC48V入力
・ROSパッケージ(Gazeboシミュレータ含む)提供
・ユーザーマニュアル提供
・6ヶ月間メールサポート
■オプション
・静音電源(AC100V→DC48)
・台座(アルミフレーム)
・ウェアラブル遠隔操作装置(仕様検討中)
■その他
・アームとハンド単体の購入も相談可能です
※上記仕様は若干変更になる可能性もありますので予めご了承下さい
■東京ロボティクスについて
東京ロボティクスは、人間共存ロボットを含む最先端ロボットを追求し、効率的な社会の実現を目指す早稲田大学発のロボティクススタートアップです。創業間もない時期は、力制御可能なロボットアームや双腕ロボットの開発を中心に行ってまいりました。近年は、力制御可能な全身人型ロボットを開発するとともに、最先端ロボットに必要なビジョン(3次元カメラ)や画像認識・機械学習、遠隔操作など研究領域を広げております。また、研究開発にとどまらず社会実装する事業も加速しており、多くの大手企業と共同開発および実証実験を進めております。
■求人情報
東京ロボティクスでは、一緒に最先端ロボットを開発する仲間(正社員・インターン)を募集中です。以下問い合わせ先、若しくはWantedlyよりご応募ください。
問い合わせ先:recruit@robotics.tokyo
Wantedly:https://www.wantedly.com/companies/robotics

|
東京ロボティクス株式会社 ホームページはこちら




