ニュース
ROS対応3Dシミュレーターモデル メカナムローバー版 配布開始【ヴイストン】
2020年8月19日
ROS対応3Dシミュレーターモデル メカナムローバー版 配布開始
メカナムローバーに関しても動作シミュレーションの実行が可能に
ヴイストン株式会社(本社:大阪府大阪市、代表取締役:大和信夫)は、実機を使わなくともシミュレーター上でROSプログラムの動作やLRFを用いたSLAMの確認が可能な、「ROS対応3Dシミュレーターモデル メカナムローバー版」の無償配布を開始します。
 ROS対応3Dシミュレーターモデル メカナムローバー版 実行画面例
ROS対応3Dシミュレーターモデル メカナムローバー版 実行画面例
■主な特徴
弊社製の研究開発用台車ロボットシリーズは、ROS対応、Arduino IDE対応、Wi-Fi・Bluetooth®搭載などの特徴を備え、可搬重量も約40kg、約120kgのモデルをラインナップし、様々な研究・開発用途に柔軟に適応可能です。「メカナムローバーVer2.1」においては、可搬重量約40kgの筐体をもち、前後左右の移動や旋回が可能なメカナムホイールの搭載により、高い運動性能、運搬性能を実現しています。
このたび配布を開始するROS対応3Dシミュレーターモデル メカナムローバー版は、メカナムローバーVer2.1に対応した3Dモデルを、オープンソースの3Dシミュレーターである「Gazebo」上で動作させることのできるモデルファイルです。メカナムローバーVer2.1の実機がなくてもGazebo上でシミュレーションが可能で、大型台車ロボットのプログラム作成時に懸案となりがちな、安全性の事前確認や全体動作の検証などが実現できます。
弊社では、すでに配布開始している「ROS対応3Dシミュレーターモデル メガローバー版」と合わせ、柔軟でオープンなプログラミング検証環境を提供することにより、研究開発用台車ロボットシリーズを活用した様々な社会問題の解決を強力に後押しして参ります。
(1) 3Dシミュレーター内で、安全かつ手軽に動作確認が可能
これまで、メカナムローバーの実機において動作確認を行う際には、周囲の安全確認やバッテリーの充電管理、稼働中の動作監視など、大型台車ロボットならではの取り扱い上の注意点が多くありました。
本モデルを用いると、3DシミュレーターのGazebo上で台車ロボットを仮想的に動作させることが可能となります。そのため、基本的なプログラム動作確認をシミュレーター上で行い、プログラム内容のブラッシュアップを済ませたのちに、実機で動作確認を行うという開発工程を踏むことができます。
シミュレーター上での動作内容は実機と完全に一致するものではないため、実機での動作確認は必要となりますが、開発工程全体で実機を動かす回数を減らすことができ、動作プログラム作成の省力化に寄与します。
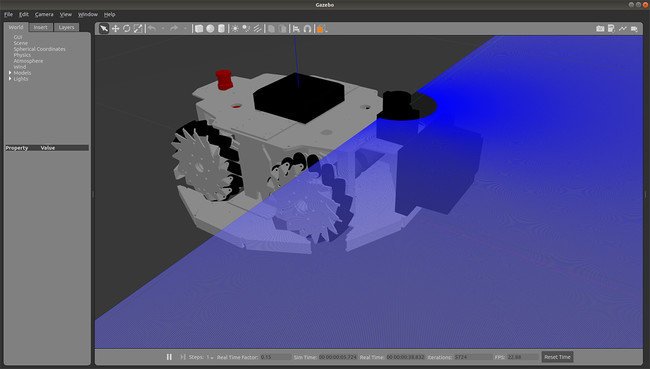 Gazebo上でのシミュレーション実行例
Gazebo上でのシミュレーション実行例
(2) プログラム作成時の問題切り分けツールとして活用可能
台車ロボットのプログラム作成において「ロボットがうまく動かない」等の問題が発生し、その解決を試みる時には、その原因がプログラム側にあるか、ハードウェア側にあるか、あるいはネットワークや他デバイスとの接続問題であるかによって対応が異なります。この「問題発生箇所の特定と解決」には、その可能性が多岐にわたることもあり、多くの時間を要します。
本モデルを用いると、3Dシミュレーター上でプログラムを実行することにより、理想的な状態でのプログラム実行結果を確認することができます。こういった行程を踏むことで、問題がどこで発生しているかを把握することが、より迅速になることが期待できます。
(3) シミュレーターのモデルは独自に拡張が可能
本モデルはメカナムローバーの標準機体をシミュレーションしていますが、ユーザーの手元でモデルの追加や編集が可能です。実使用の環境に合わせたモデル変更等を行うことで、目的となる動作環境により近づけたシミュレーションが実行でき、結果の有用性がいっそう高まります。
(4) 各種の専用オプションに対応
メカナムローバーVer2.1を購入する際に指定できる有償オプションについて、本モデル上にも実装されています(用途に合わせ、設定ファイルを変更することによりモデルの有効・無効が選択できます)。
実装済みオプションは以下の通りですが、その機能までをシミュレーションするものは「LRFオプション」「全周囲バンパーオプション」のみです。他は形状と質量のみのモデルとなっています。
・LRFオプション
・全周囲バンパーオプション
・非常停止スイッチオプション
・ワイヤレス充電オプション
・ROS PCオプション
(5) ロボット本体が手元になくてもシミュレーションを実行可能
本モデルはシミュレーター内で完結して利用でき、メカナムローバー本体は必要ありません。そのため複数人でロボット本体をシェアして開発を進める場合などにおいても、より効率の良いプロジェクトの進行に寄与します。
メカナムローバーをROSロボット教育用の教材として活用するといったシーンや、メカナムローバー購入前の動作確認といった用途にも合致します。
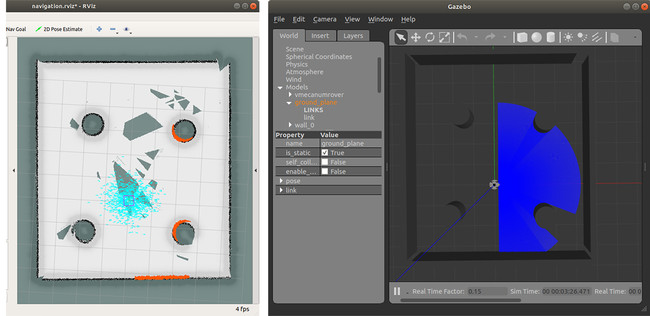 サンプルマップでのNavigationと、そのシミュレーション画面例
サンプルマップでのNavigationと、そのシミュレーション画面例
■ご注意ください
本モデルは、3Dシミュレーター「Gazebo」上でメカナムローバーの基本的な動作確認を行うことを目的としています。Gazeboの能力を超えるシミュレーションには対応できないほか、厳密に実機と同じ挙動をシミュレーションすることを目的としたものではありません。最終的な動作確認は実機のメカナムローバーを使うことを強く推奨します。特に、摩擦係数については厳密に実装されていませんので、重量物を搭載した場合のシミュレーション結果については、現実との差異が大きくなる可能性があります。
また、ROS対応3Dシミュレーターモデル メカナムローバー版として配布されるものは、あくまでシミュレーター用のモデルファイルとそれに付随する情報のみとなっています。メカナムローバーの実機に関する情報は、本モデルに付随しては提供されません。
■配布場所
・ROS対応3Dシミュレーターモデル メカナムローバー版
配布ページ: https://www.vstone.co.jp/products/wheelrobot/ver2.1.html
Github: https://github.com/vstoneofficial/mecanumrover_samples
ヴイストン株式会社
〒555-0012 大阪府大阪市西淀川区御幣島 2-15-28
E-mail: infodesk@vstone.co.jp
https://www.vstone.co.jp/
ヴイストン株式会社ホームページはこちら




