ニュース
未来のレーダー・プロセッシングに求められるもの【日本テキサス・インスツルメンツ】
2020年1月15日
レーダー(電波探知測距)システムは、何十年にもわたり、天気予報から防犯用途まであらゆるところで多方面に利用されてきましたが、21世紀に入る頃から自動車関連にも採用され始めました。この技術記事では、車載機器での典型的なユースケースとそれに関連したトレンドを詳しく見ていきます。
現在、路上には24GHzベースのレーダー・システムが何百万台も存在し、さらに、TIのRFCMOS AWRx製品ライン など、次世代の76~81GHzをベースにしたシステムも登場しています。大まかにレーダー・システムの構成は図1に示す最終製品カテゴリに分けられ、さらに対応可能な有効範囲(距離)によって約1メートルの近距離システムから400メートルの長距離システムまで区分されます。

図1 – CMOS*ベースのレーダー構成の概要
(*相補型金属酸化膜半導体)
一般的に、有効距離が延び要求される精度が高くなるほど、より高い処理能力が必要になりますが、これは図1の「CMOSベースのレーダー構成の概要」で、レーダー(MMIC)デバイスの数が増えると共にプロセッサが現れることからも分かります。追加されたプロセッサに付随するメモリによっても、システムのメモリ性能が顕著に高まり、さらに機能が拡大します。
典型的なシステムの1つが、走行中の車で前方経路上での検知と距離測定に使われる、中長距離の前方レーダー・システムです。このアダプティブ・クルーズ・コントロール・システムは、システムを搭載している車とその前方の車との車間距離を測りながら、走行速度を自動的に調節します。制御下におかれる車が安全に走行するには、この種のシステムの精度が非常に重要なものとなります。複数のMMICとプロセッサを1つ使用することで、角分解能と有効距離が大幅に増加します。複数のMMICから出力されるデータをプロセッサが処理することで、角度と距離の分解能が向上し、全体的な検知距離も広がります。
複数のMMICデバイスと1つのプロセッサを使用してさらに下流の演算処理を提供するシステムが、カスケード接続イメージング・レーダー(CIR)システムです。CIRシステムはプログラム可能なので、プロセッサ上で実行するソフトウェア・アルゴリズムや、関連するMMICの構成形態、アンテナ設計によって、短距離、中距離、長距離などさまざまなタイプのレーダー・システムの機能を提供することができます。このような柔軟性に加えて、これらのCIRシステムでは、長距離の場面で距離と分解能を向上させるビーム形成技術と、対象の領域が近くなるにつれて角分解能の精度を高める複数入力/複数出力(MIMO)技術を使用することで、運転安全性が大幅に向上します(図2参照)。これらの技術により、車前方の物体に対する検出距離、距離分解能と角分解能/精度が向上し、システムの有効性が高まります。
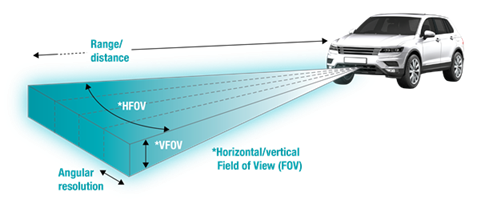 図2:車の認識機能に関する用語
図2:車の認識機能に関する用語
図3に、MMICから出力される生のデータをもとに物体検出を行う様々なステップを示します。最近リリースされたTIの「JacintoTM ADASプロセッサを使用したカスケード接続イメージング・レーダーのキャプチャと融合プラットフォーム 」のような4チップCIRシステムの場合は、MMIC(TIのミリ波AWRセンサ)デバイスで生成されるデータ・ストリームごとに、かなりの処理量が必要とされます。TIの車載ADASプロセッサ製品ラインのSoCであれば、単体でこれらの処理要求量に容易に応えることができます。『TDA2SXBTQABCQ1 』は、多種類のCPU(4つのSIMD(EVE)、2つのDSP(C66)、6つのArm® Cortex®(A15×2、M4×4)コア)を内蔵する異種混在アーキテクチャを使用して、この処理すべてにこれ1つで余裕を持って効率的に対応できます。
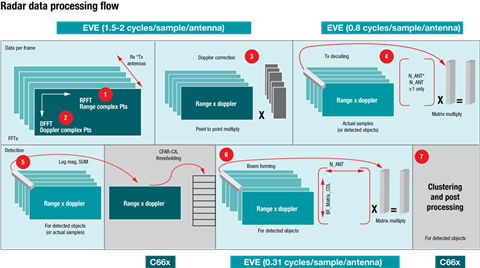 図3:レーダー・データ処理フロー
図3:レーダー・データ処理フロー
図3は、これらのコアにレーダー処理フローがどのように割り当てられるかも示しています。丸付き数字が付いた色分けは、その特定の操作を実行するコアに対応しています(青はC66、緑はEVE)。Armコアは、システムの汎用アプリケーション管理と全体的制御コードを実行します。図4では、TIの4チップCIRリファレンス・デザイン で使われている『TDA2SX』デバイスの処理がどう分割されているかを別の概要図で表しています。
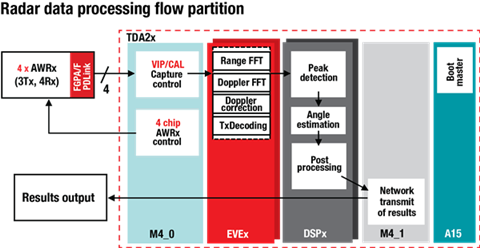 図4:レーダー・データ処理フロー区分
図4:レーダー・データ処理フロー区分
レーダー・システムの機能が向上して複雑さを増すと、処理要件も増大します。図5は、必要とされる命令数(百万単位)に合わせて一般的なレーダー・キューブ・メモリが増大する様子を示しています。車載分野では下図のようなトレンドが続くため、今後も処理要件と複雑さが増し、より高い処理能力の要求に拍車がかかるでしょう。TIのレーダーMMIC(AWRx)とADASプロセッサ(TDAx)の組み合わせは、独自のアーキテクチャ、テクノロジ、さらにソフトウェア開発キット(SDK)によって、これらのニーズに応えることができます。TIの『TDA』ADASプロセッサ・ファミリのようなスケーラブルな製品ファミリを使用するシステムを選定し、開発し、製品化することは、開発期間全体を短縮しながらシステム効率を向上させる形で、このような現在進行中のトレンドに取り組んでいくのに役立ちます。
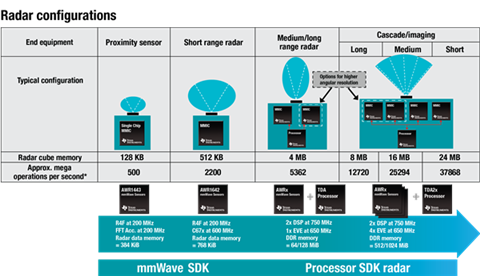 図5:メモリとプロセッシングのトレンドを追加したレーダー構成図
図5:メモリとプロセッシングのトレンドを追加したレーダー構成図
短距離、中距離、長距離システムを1つのCIRシステムに統合できると、車載システムの総数が減り、それに伴う電力消費、対応する電源設計やコストも削減することができます。また、プロセッサによる性能向上の結果、併用システムのコスト削減あるいは併用システムが不要になる可能性もあります。例えば、必要なカメラ解像度/フレーム・レートが最低限でよくなったり、超音波センサの数が減ったり不要になったりするかもしれません。
レーダー独自のトレンドに加えて、車にいくつものセンサを使用し、異なる装置を融合することで機能安全性を高めるという全体的なトレンドもあります。センサの融合は、これらのシステムが適切に処理する必要があるさまざまな環境ごとの違いを埋め合わせるのに有用です(図6参照)。下表を見ると、典型的な車載認識機能に関して、どのセンサがどの状況に最もよく対処できるかの理解が深まります。単独でこれらすべての要件に対処できるセンサはなく、認識精度を大きく高めるにはさまざまなセンサのデータを融合する必要性があることが分かります。
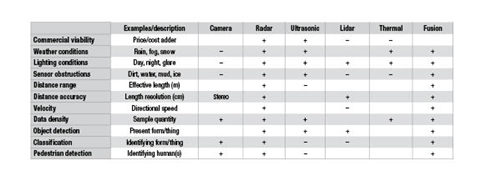 図6:センサの長所(+)と短所(-)の一覧表
図6:センサの長所(+)と短所(-)の一覧表
これまで述べたようなトレンドには、処理速度と処理効率の向上が必然的に求められますが、TIの『TDAx』ADASプロセッサ製品ラインであれば十分対処することができるでしょう。
参考情報
+リファレンス・デザイン
+Jacintoプロセッサ「TIDEP-01017」
+ミリ波センサ「TIDEP-01012」
+Jacinto TDAx SoC ファミリの詳細はこちら
+技術記事(英語) “Tips for designing a robust computer vision system for self-driving cars
”.
+ADASテクノロジに関するホワイトペーパー
+「車載マルチカメラ動作向け次世代アーキテクチャの実現」
+(英語)”Making cars safer through technology innovation
”
+(英語)”Stereo vision—Facing the challenges and seeing the opportunities for ADAS applications”
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※上記の記事はこちらの技術記事
(2019年7月17日より翻訳転載されました。
※ご質問はhttp://e2e.ti.com/support/
E2E Support Forumにお願い致します。
日本テキサス・インスツルメンツ株式会社ホームページはこちら




