ニュース
業界初※1SPAD画素を用いた車載LiDAR向け 積層型直接 Time of Flight方式の測距センサーを開発【ソニー】
2021年2月18日
業界最小※1SPAD画素を用いた車載LiDAR向け
積層型直接 Time of Flight方式の測距センサーを開発
※1 車載LiDAR向け積層型測距センサーとして。2021年2月18日広報発表時点。
ソニーは、業界初※1となるSPAD(Single Photon Avalanche Diode)画素を用いた車載LiDAR(ライダー)向け積層型直接 Time of Flight(dToF)方式の測距センサーを開発しました。
本成果は、2021年2月13日(土)から開催されているISSCC(国際固体素子回路会議)において発表しました。
先進運転支援システム(ADAS)の普及や自動運転(AD)の実現に向けて、カメラやミリ波レーダーなどのセンシングデバイスに加え、道路状況や、車両、歩行者など対象物の位置や形状を、高精度で検知・認識が可能なLiDARの重要性が高まっています。
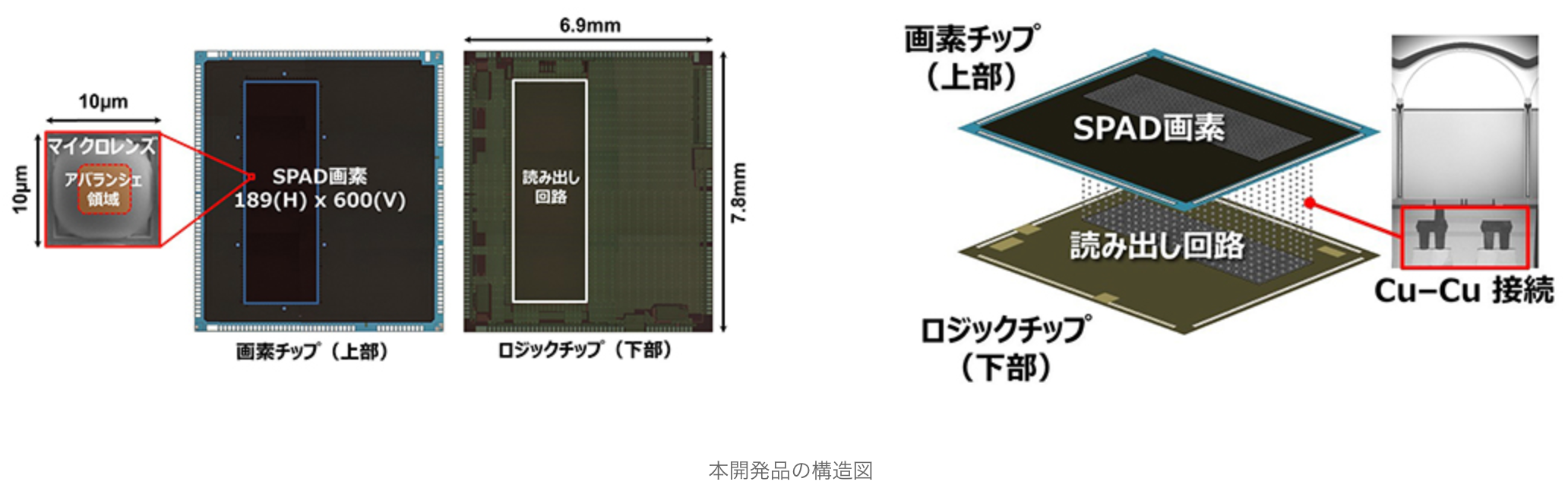
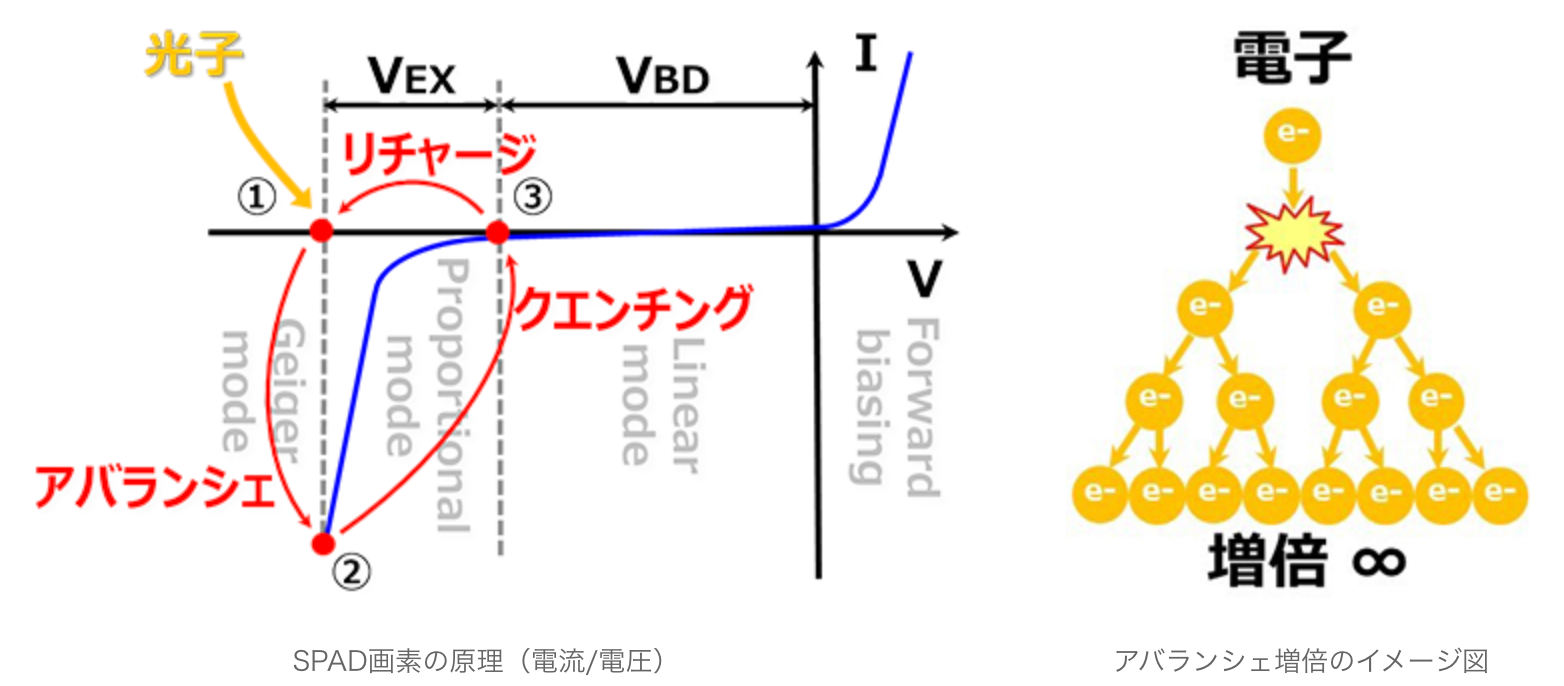
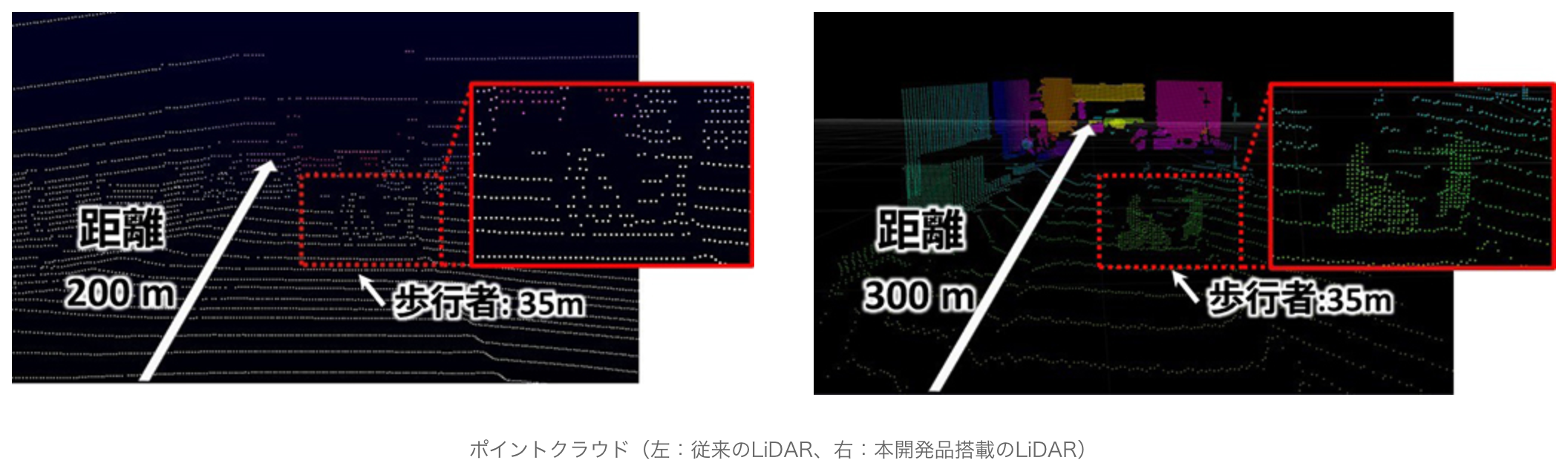
SPADとは、入射した1つの光子(フォトン)から、雪崩のように電子を増幅させる「アバランシェ増倍」を利用する画素構造で、弱い光でも検出することができます。光源から発し対象物で反射した光が、センサーに届くまでの光の飛行時間(時間差)を検出し、対象物までの距離を測定するdToF方式の受光素子として用いることで、長距離かつ高精度な距離測定が可能です。本開発品は、ソニーがCMOSイメージセンサー開発で培ってきた裏面照射型、積層型、Cu-Cu(カッパー・カッパー)接続※2などの技術を活用することにより、SPAD画素と測距処理回路を1チップ化し、小型ながら高解像度を実現します。これにより最大300mの距離を15cm間隔で※3、高精度かつ高速に測定が可能です。また、さまざまな温度環境や天候など、車載用途に求められる厳しい条件下での検知・認識による信頼性の向上や、1チップ化することによるLiDARの低コスト化に貢献します。
ソニーは、本開発品を搭載したMEMS(Micro Electro Mechanical Systems)方式※4のLiDARも評価用として開発し、顧客やパートナーに向けて提供を開始しています。
※2 画素チップ(上部)とロジックチップ(下部)を積層する際に、Cu(銅)のパッド同士を接続することで電気的導通を
図る技術。画素領域の外周の貫通電極により、上下のチップを接続するTSV(シリコン貫通電極)に比べて、設計自由度や
生産性の向上、小型化、高性能化などが可能。
※3 高さ1m、反射率10%の対象物を、昼間曇天下に6画素(H)×6画素(V)加算モードで測定する場合。
※4 MEMSとは、さまざまな部品を一つの基板上に微細加工技術によって集積化したデバイス。
本LiDARは、光源から発した光をMEMSミラーで走査する方式を採用。
SPAD画素の原理
dToF方式を用いた測距センサーでは、単一光子の検出を行うSPAD画素が用いられます。SPAD画素内の電極にブレークダウン電圧(VBD)※5を印加し、その電圧を超える過剰エクセスバイアス電圧(VEX)※6に設定した状態で光子を入射させることで、光電変換により発生した電子がアバランシェ増倍によって増幅します。電極間の電圧がブレークダウン電圧まで低くなると、アバランシェ増倍は停止します。アバランシェ増倍により発生した電子が放電され、ブレークダウン電圧まで戻った後(クエンチング動作)、再び電極間の電圧を過剰エクセスバイアス電圧に設定すると、光子が検出できる状態に戻ります(リチャージ動作)。このように、光子の到来時刻を開始点とする電子の増倍動作は、ガイガーモードと呼ばれます。
※5 アバランシェ増倍が発生し始める電圧。
※6 ブレークダウン電圧(VBD)を超える電圧。
開発品の主な特徴
1)最大300mの距離を15cm間隔で高精度に測距
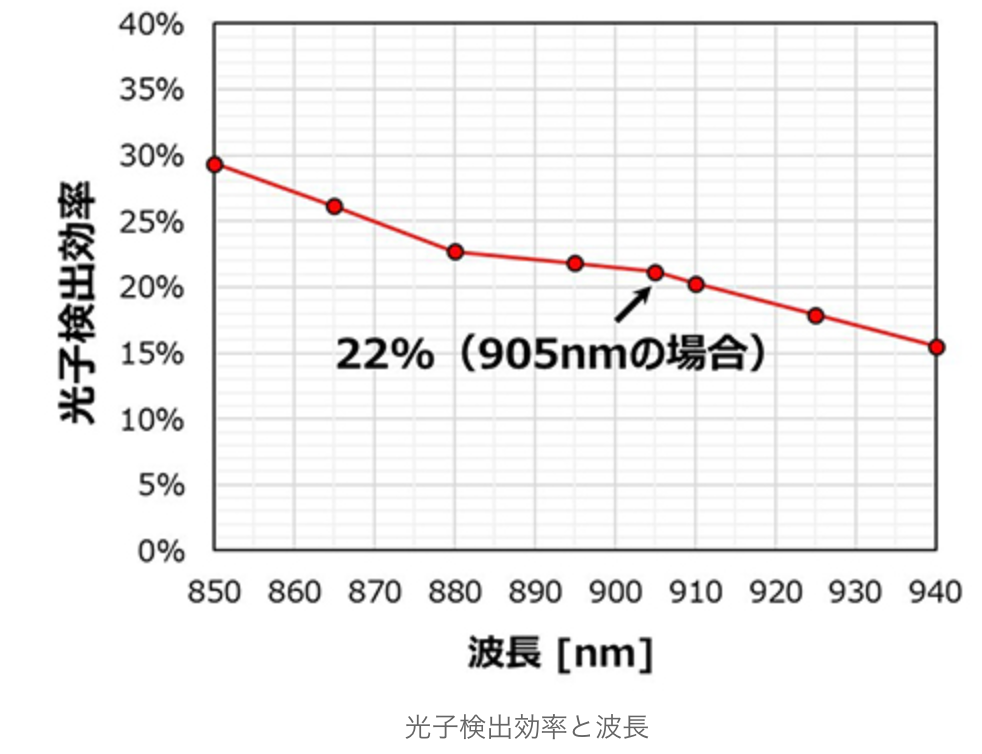
裏面照射型のSPAD画素構造を用いた画素チップ(上部)と、測距処理回路などを搭載したロジックチップ(下部)を、Cu-Cu接続を用いて一画素ごとに導通しています。これにより、光を取り込む画素以外の回路部を下部に配置することで、開口率※7を高め、22%※8の高い光子検出効率を実現したのに加え、チップサイズは小型ながら、10μm画素サイズで有効画素数約11万(189画素×600画素)の高解像度化を図りました。最大300mの距離を、15cm間隔で高精度に測距することが可能になり、LiDARの検知・認識性能の向上に貢献します。
※7 1画素当たりに光入射面側からみた開口部分(遮光部以外)の割合。
※8 一般的な車載LiDARに用いられる905nmの波長のレーザーを対象物に照射した場合。
2)独自のTime to Digital Converter(TDC)とパッシブ型クエンチング/リチャージ回路を活用した高速な 応答速度
検出した光子の飛行時間をデジタル値に変換するTime to Digital Converter(TDC)とパッシブ型クエンチング/リチャージ回路を独自に開発し、画素ごとにCu-Cu接続することにより、一光子あたりの応答速度を通常時6ナノ秒※9に高めることが可能となります。高速な測距処理により、周囲の状況をリアルタイムで検知・認識しながら、より安全な走行の実現に貢献します。
※9 温度環境60℃の場合。
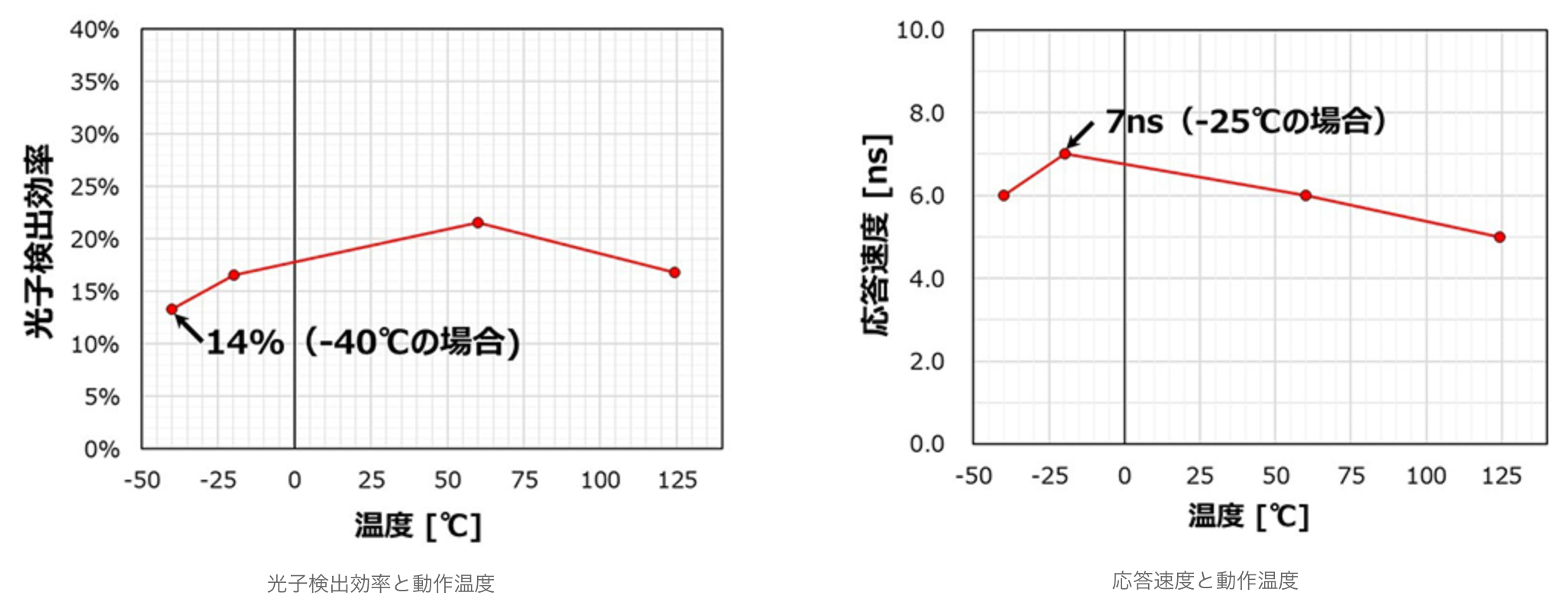
3)厳しい条件下での安定した光子検出効率および応答速度
独自のSPAD画素構造により、-40℃から125℃の厳しい条件下においても、安定的な光子検出効率および応答速度を実現することで、LiDARの信頼性向上に貢献します。
主な仕様
| SPAD画素数
イメージサイズ 推奨光源波長 SPADユニットセルサイズ エレメントサイズ(ToF画素単位) 消費電力 光子検出効率 応答速度 飽和信号量(最大カウントレート) 最大検知距離 300m測距時の距離精度 |
189画素(H)×600画素(V) 約11万画素
対角6.25mm(1/2.9型) 905nm 10µm×10µm 3画素(H)×3画素(V) 1,192mW 22% 6ns 60,000,000cps 300m 3画素(H)×3画素(V)加算モード:30cm 6画素(H)×6画素(V)加算モード:15cm |
ソニー株式会社ホームページはこちら




