ニュース
Japan Automotive AI Challenge自動運転AIチャレンジ 2019年3月23日(土)、24日(日)開催 結果発表【自動車技術会】
2019年3月25日
Japan Automotive AI Challenge自動運転AIチャレンジ 2019年3月23日(土)、24日(日)開催 結果発表
後援:経済産業省、東京大学生産技術研究所、東京大学モビリティ・イノベーション連携研究機構、日本自動車工業会
公益社団法人自動車技術会(会長 坂本 秀行)は、2019年3月23日(土)~24日(日)に、東京大学生産技術研究所付属千葉実験所(柏キャンパス)を会場として、「Japan Automotive AI Challnege 自動運転AIチャレンジ」を開催致しました。
本競技は、参加者が開発した画像認識アルゴリズムをカート車両に実装し、試験路において設定した課題を自動運転走行でクリアし順位を競うイベントで、シナリオ完走部門・制御精度部門の2部門で実施しました(詳細は後述)。
本イベントは、以下の4チームの参加となりました(参加条件は、オンラインの画像認識アルゴリズム精度競技「経済産業省主催AIエッジコンテスト」のランキング上位者)。
・カーナンバー1:チーム「kaggler-lya」
チーム代表:横尾 修平(筑波大学大学院) チーム人数:2名
・カーナンバー2:チーム「WARRIORS」
チーム代表:Miao Zhang(浙江大学) チーム人数:3名
・カーナンバー3:チーム「MTLLAB」
チーム代表:谷合 廣紀(東京大学大学院) チーム人数:3名
・カーナンバー4:チーム「r488it」 ※特別枠
チーム代表:呉 澤(会社員) チーム人数:3名
各チーム、実装したアルゴリズムを調整しテスト走行を繰り返した上で競技に挑んだ結果、シナリオ完走部門・制御精度部門共にチーム「MTLLAB」が優秀賞を受賞しました。

また、本イベントのサイドイベントとして、「AIと自動運転が切り拓く未来のモビリティ社会 AIはモビリティ社会をどう変える?課題は?」と題して、人工知能技術研究者と自動運転技術開発者によるパネルディスカッションを開催しました。
1stチャレンジ:シナリオ完走部門
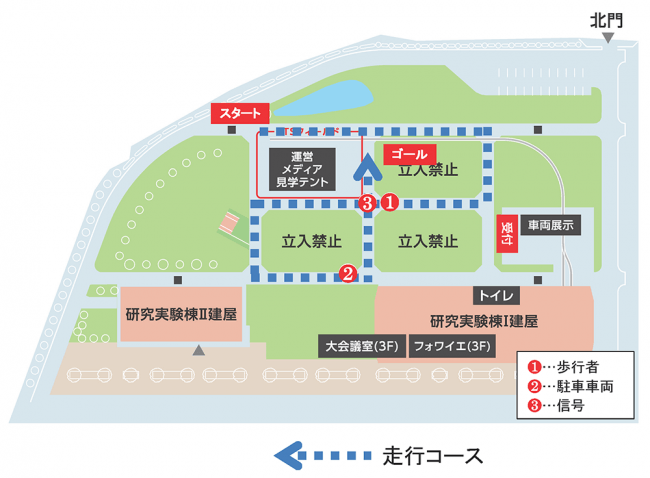
(クリア課題)
競技車両を既定のコースに従って自動運転させる。
ポイント①では横断歩道に立つ歩行者を認識し、車両を自動停止させる。歩行者が去った後、車両の走行を自動再開させる。
ポイント②では駐車車両を認識し、車両を自動停止させる。駐車車両が去った後、車両の走行を自動再開させる。
ポイント③では赤信号を認識し、車両を自動停止させる。青信号になった後、車両の走行を自動再開させる。
本番走行をする場合は、走行前にその旨宣言してから自動走行を開始する。
(競技レポート)
初日14時より本競技を開始、最初の1時間はWaypointの取得や設定最適化の調整作業に集中、本番走行をするチームは無かった。
15時、事前トレーニングの時間でWaypoint取得を済ませていたチーム「r488it」が本番宣言。チーム「r488it」は「歩行者」、「駐車車両」の認識を成功させたが、「信号」を正しく認識できず、初トライでの完走はできなかった。その後、他チームも本番走行にトライするも、この日完走したチームは出なかった。
2日目は9時30分より1時間の予定で1stチャレンジを再開。最初の走行でチーム「MTLLAB」が「歩行者」、「駐車車両」、「信号」の認識をすべて成功させ、初完走となった。その後、残り時間で他チームも走行に挑むが、チーム「MTLLAB」以外で完走チームは出なかった。
2ndチャレンジ:制御精度部門
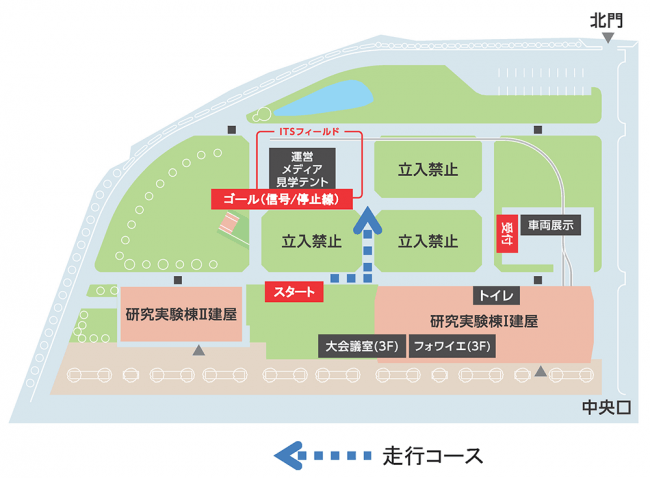
(クリア課題)
競技車両を既定のコースに従って自動運転させ、所定の場所に停車させる位置精度を競う。
交差点で赤信号を認識し、車両を自動停止させる。その際、車両の前輪を停止線に出来るだけ近づける。
停止線-左前輪タイヤ中心線までの距離を測定し、リザルトとする。
停止線をオーバーランしたら失格とする。
各チーム2トライまでを有効なリザルトとし、より良いリザルトを比較し最終的な優劣を競う。(3トライ目以降も可能だが、参考記録の扱いとする。)
(競技レポート)
2日目10時30分より競技開始。1stトライでチーム「r488it」が125cmを記録し、暫定トップとなる。
チーム「kaggler-lya」は175cmで暫定2位、チーム「MTLLAB」は1stトライで停止線をオーバーし失敗。チーム「WARRIORS」は信号を認識できず失敗となった。
その後、各チーム2ndトライを行い、チーム「r488it」は29.5cmを記録し、1stトライの記録を更新。その後、すぐに3rdトライを敢行し、2cmに記録を更新したがこれは参考記録となる。
チーム「MTLLAB」が2ndトライを行い、63cmを記録。暫定2位につける。その後、チーム「kaggler-lya」・チーム「WARRIORS」が2ndトライを行うも、それぞれオーバーラン・信号認識失敗となった。
全チーム2ndトライ終了時点でチーム「r488it」が最高記録をマークしていたが、当該チームは特別枠での参加であったため、次点のチーム「MTLLAB」が繰り上げで本競技の勝者となった。
チーム「MTLLAB」はその後3rdトライを行い、チーム「r488it」の2cmを上回る0cm(参考記録)をマークして有終の美を飾った。

表彰
■優秀賞(シナリオ完走部門) 賞金30万円 および 経済産業省製造産業局長賞
チーム「MTLLAB」
■優秀賞(制御精度部門) 賞金20万円 および 日本自動車工業会長賞
チーム「MTLLAB」
参加賞として、Lidarセンサー Velodyne LiDAR VLP-16を各チームに1台づつ贈呈
お問い合わせ
(公社) 自動車技術会 担当:島田 鹿目(かのめ)
TEL: 03-3262-8219 / FAX: 03-3261-2204
Email: press@jsae.or.jp
関連リンク
Japan Automotive AI Challenge 自動運転AIチャレンジ オフィシャルサイト >>
https://www.jsae.or.jp/jaaic/
公益社団法人自動車技術会ホームページはこちら




