最前線コラム
三相AC モータの効率/損失特性図の作成による 最適な駆動ポイントの判定【スペクトリス(株)HBM事業部】
電気自動車やハイブリッド車の走行距離を伸ばそうという取り組みが続く中、動作部の要である電動モータの効率/損失の評価手法は極めて重要度を増しています。1つの主要な課題は、モータのすべての駆動ポイントにおいて計測プロセスをいかに自動化できるかという点です。この技術レポートでは、三相IPM 電動機にトラクションをかけた試験を例に、エネルギー効率/損失特性図の作成方法を紹介します。なおこの方法はどのAC 電動機の評価にも使用できます。評価システムは、HBM のデータレコーダであるGenesisHigh Speed シリーズ(以降GEN DAQ)を使用しています。
テスト装置の説明
最初に、効率/損失特性図作成で使用するテスト装置(図1)について説明します。
| ● MUT: | 試験用モータ、IPM モータ |
| ● モータコントローラ: | dSpace 製、専用のアナログ/デジタル入出力 |
| ● DM: | 駆動用モータ、AC/AC 双方向コンバータで電力供給されるPM モータ、速度制御はdSpace DAC からのアナログ出力 |
| ● トルク計測: | HBM 高精度トルクセンサT40B、軸トルクと位置(1024 パルス/回転) を計測(図2) |
| ● 相電流計測: | 高精度LEM センサ、2MS/s でGEN DAQ に連続データ保存(図3) |
| ● MUT 線間電圧計測: | 高電圧を直接GEN DAQ で計測、2MS/s の高速連続保存、計測された電圧は電動機に印加される実際のPWMパルスとして観察可能 |
| ● 位置測定: |
トルクセンサT40B からのロータの位置に加え、GEN DAQ はインクリメンタルエンコーダからのロータの位置も測定(図1)
|
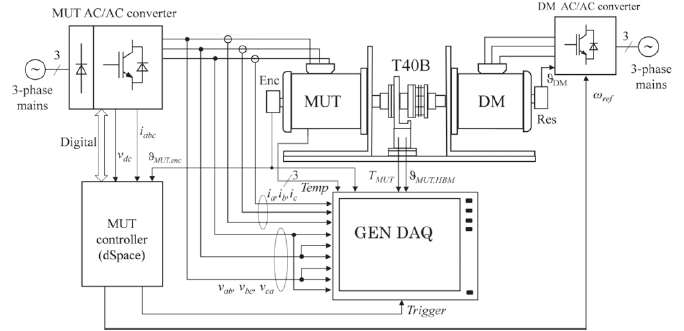
図1 モータ効率/損失特性図の作成に使用するテスト装置の構成
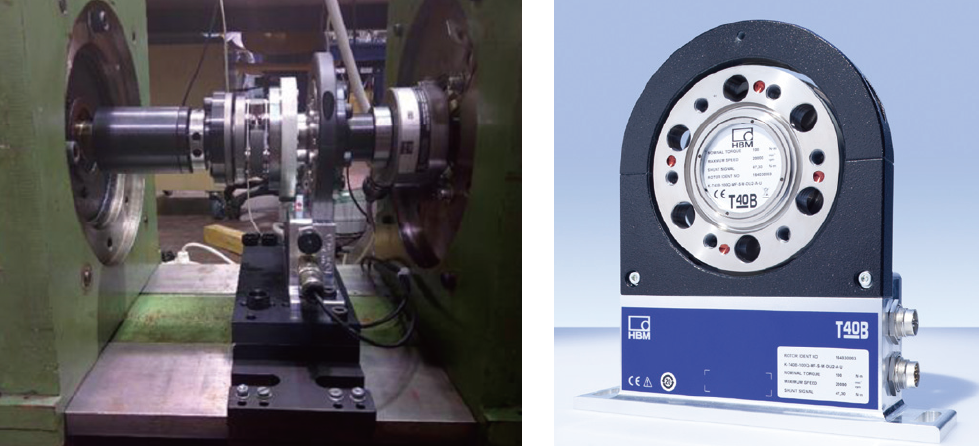
図2 HBMの高精度トルクセンサT40B

図3 HBMデータ収集システム/レコーダGenesis High Speedシリーズ(GEN DAQ)
データ収集プロセス
完全なモータ効率/損失特性図を作成するには、モータの様々な設定値のデータを総合的に収集する必要があり、モータ速度を最小値(ω min)から最大値(ω max)まで変化させます。変化させる速度の範囲(ω max – ω min)を20 程度に分けて設定速度としてそれをΔωとします。各設定速度で印加トルクを最小値(Tmin)から最大値(Tmax)まで変化させます。トルクの変化の範囲(Tmax -Tmin)を20 程度に分けて設定トルクとし、それをΔT とします。
その結果T-N 平面にN = n x m 点の計測ポイントができます(図4)。
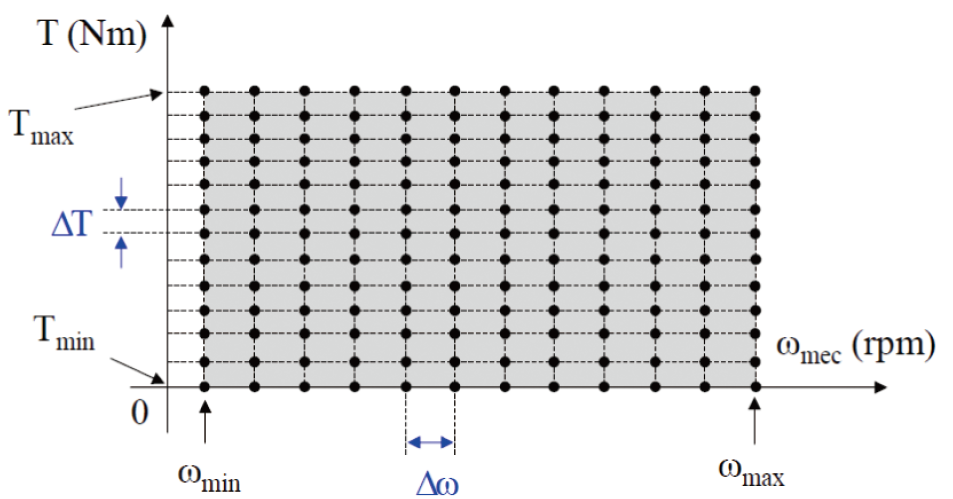
図4 T-N平面にマッピングされた計測ポイント
速度制御されたDM とトルク制御されたMUT を使用し、先に決めた計測ポイントにおいて速度を一定に保ちながらトルクをΔ T毎に変化させデータ計測を行います。すべてのプロセスはdSpaceコントローラが制御します。すべての計測点でMUT とDM が設定されたトルク値と回転数に達するとGEN DAQ のトリガが発動し単一スイープモードでデータを取り込みます。GEN DAQ システムではデータ収集と分析はリアルタイムで実行されるため、1 つの計測点あたりにかかる計測とその処理時間は1 秒程度であり、計測ポイント間の待機時間はわずか100ms となります。T-N 平面にマッピングされた400 点の計測を行う場合、7 分程度ですべての試験が完了し、しかもリアルタイムでデータは処理されているため、試験終了後すぐに分析されたデータを確認可能です。
計測後、記録されたデータの更に詳細な分析を行うためには従来のパワーアナライザのように、RMS や各電力項目だけを記録するだけでは十分ではありません。GEN DAQ は各計測点の電圧、電流、トルク、速度、角度を記録します。特に記録されたデータからdq0 変換されたd 軸電流、q 軸電流を演算し表示する為には角度情報が必須です。計測ポイントでの計測データ例を図5 に示します。
図5- 左は複数計測点(9 点)の計測例、図5- 右は計測点1 点の例です。合計400 点の計測を行う場合、図5- 右の計測点が400 点発生します。繰り返しになりますが、GEN DAQ の場合、400 点の計測を7 分間で終了させることが可能です。図5- 右は上からMUT 電流、MUT 線間電圧、角度、磁束、トルクの瞬時値を示しています。
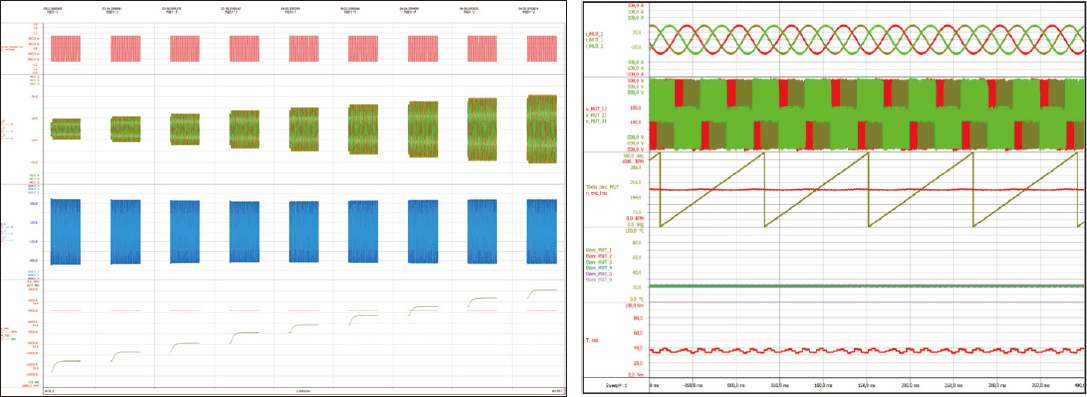
図5 ある計測点でのデータ収集の例
GEN DAQ による基本的な分析とその応用
試験が終了した時点でT-N 平面上にマッピングされた400 点の計測点からなる大容量のデータはGEN DAQ の記録ディスクに保存されています。GEN DAQ はそれぞれの計測点においてデータ記録と同時に以下の演算を実施しています。
● 入力電力
● 銅損(ジュール損)
● モータの機械的な仕事量
● 鉄損と機械損
● モータ効率とインバータ効率
●(d, q)ロータの鎖交磁束
●(d, q)ステータ電流と電圧
これらの演算式はGEN DAQ のFormula データベースに用意されており、必要な演算はFormula データベースから設定して実行可能です(スペースの関係上ここでは省略しますが詳細はHBM のWEB サイトをご覧ください)。
すべての分析のベースとなるのは基本周波数を1/2 サイクル毎にリアルタイムに判定するデジタルアルゴリズムです。よって、演算を含む分析は1/2 サイクルが判定された直後から実施されます。サイクル変動を最小化する場合は、1/2 から数百サイクルの間でサイクル数を自由に選び平均化することが可能です。ダイナミックレンジは犠牲になりますが、1/2 サイクルを使用しそのサイクルを平均化すればノイズ影響を最小化することが可能です。デジタルデータ処理技術は、従来のパワーアナライザが提供するようなアナログPLL 技術に比べて極めてスピーディに試験や分析結果が得られます。GEN DAQ は判定サイクルに基づき計測データを分析し、それらの結果を表示、保存し、更なる分析結果を提供します。これらの結果は設定されたT-N 平面上の計測点に基づいたものです。
GEN DAQ の計測/分析データを使った高度な分析
GEN DAQ でMUT の計測結果を分析した後、その結果をMATLAB へ出力しMUT のモータ効率マップを作成しました(図6)。この効率マップはMUT の各トルクと各速度においての効率変化が一目でわかりモータ効率を評価する上で極めて重要です。また必要な場合GEN DAQ はインバータDC 入力も計測できます。計測結果からインバータ効率マップが、さらにドライブ効率マップが作成できます。また、効率マップに加えて、損失マップ、銅損マップ、鉄損・機械損マップがMATLAB で作成できます。
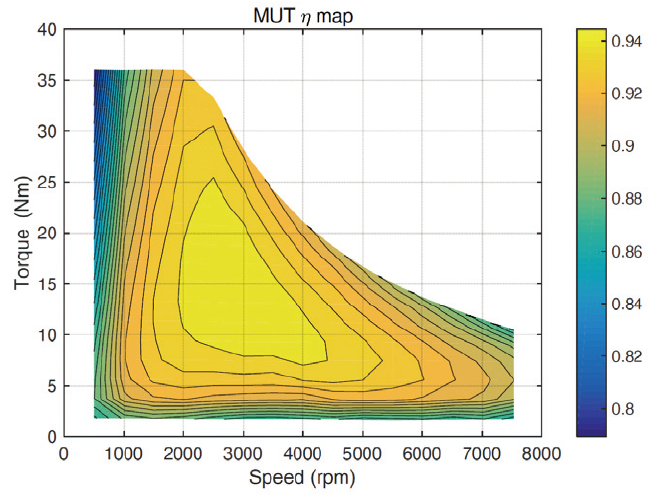
図6 MUTのモータ効率マップ
さらにdq 変動を分析することにより、適切な電動機の制御が行えているかの検証が可能です。GEN DAQ は計測されたロータ位置を使うことにより、テスト中でもdq 量(電流、電圧、磁束鎖交)を容易に得ることができ、(d, q)座標に対応したベクトルの軌跡をプロットできます。例として、図7 はテスト中の電流ベクトルの軌跡を示します。低速では、電流ベクトルと磁束ベクトルの両方が、アンペアあたりの最大トルクMTPA)を示す軌跡(黒の実線)に従います。磁束が減少すると、電流ベクトルと磁束ベクトルは最適なMTPA 軌跡から離れ、q 軸に近づきます。電流が限られているので、電流ベクトルは最大の振幅を一定に保ちますが、弱め磁束制御の場合と同様、ステータの磁束ベクトルの振幅が減少します。
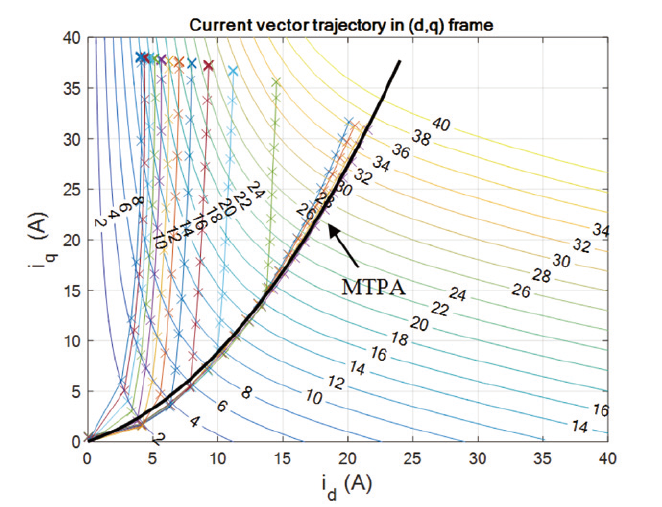
図7 (d, q)フレームの電流ベクトルの軌跡
図7 の結果により、ベース速度より下の領域で、計測された電 流ベクトルが真にMTPA 軌跡に従うかを確認できます。これに より、MUT のトルクを高く保つ最適な方法を検証できます。
まとめ
デジタルサイクル検出とdq 変換などの分析ルーチンを特別に備えたHBM のGenesis High Speed シリーズのような高性能データ
レコーダで連続記録されたデータを分析すると電気駆動系システムの動的で詳細な分析が行えます。従来のパワーメータは入力や出力、効率の数値表示のみですが、高速で連続記録されたデータにより、モータ設計と制御方法を深く考察することが可能になります。その結果、設計や制御の最適化を実施し、効率の改善が達成できます。
最後に本レポートで使用したGEN DAQ はすべての信号をすべての設定された計測ポイントで高速に記録します、その結果をリアルタイムや1/2 サイクルのような非常に短い時間軸で演算、分析できるため処理時間が短くなり、トータル試験時間の短縮に役立ちます。
スペクトリス株式会社 HBM 事業部
筆者/ Klaus Lang, HBM Business Development Manager
技術監修/スペクトリス㈱ HBM 事業部T&Mマネージャー 林垣内 知
2016年4月1日発行
テスティングツール最前線2016より転載




