最前線コラム
TRW の自動運転実現に向けた取り組み【TRW オートモーティブジャパン】
近年、新たな法規制や技術革新、自動車の安全性向上に対する消費者の要望の高まりにより、世界の主要地域における交通事故死亡者数は徐々に減少している。自動車の安全性向上に向けてこれまでにも様々な対策が講じられてきたが、ドライバーの不注意等の人的な事故要因についての関心が高まっている。
このような背景から、政府、業界団体、自動車メーカーは、乗用車に高度な安全システムの導入を進めるとともに、半自動運転あるいは全自動運転システムの開発を加速させている。
世界有数の自動車部品メーカーで、アクティブセーフティ(予防安全)・パッシブセーフティ(乗員安全)システムの世界的リーダーであるTRW では、アクティブセーフティと自動運転の技術は、ドライバーの不注意運転や高齢あるいは障害のあるドライバーの運
転、車両の「軽量化」、交通渋滞といった様々な運転上の社会的な課題に利益をもたらすことができると考えている。
●ドライバーの不注意
米国における調査によると、衝突事故の80%、ヒヤリハットの65%がドライバーの不注意に起因している。日本でも、警察
庁発表の「交通事故の発生状況」によると、2013 年に発生した交通事故のうち、安全不確認・脇見運転などの安全運転義務違反
による事故が全体の76%を占めている。
●ドライバーの高齢化
日本は、総人口に占める65 歳以上の高齢者の割合が世界で最も高く、2010 年には23%、2025 年までに30%に到達すると見込まれている。老化に伴う視力や認知機能の低下、身体的変化は、高齢ドライバーの運転能力に影響を及ぼす場合があるが、自動運転技術は、このような高齢ドライバーの運転をサポートすることができる。
● 燃費規制と車両の小型化・軽量化
米国道路安全保険協会 (IIHS)のデータによると、小型で軽量の車両に乗っている人は、大型で車重がある車両に乗っている人に比べ、交通事故による死亡率が2 倍となっている。また複数の調査から、運転操作が燃費に20%以上の影響を及ぼすことが明らかになっている。
自動運転 - 安全を最優先に -
TRW では、自動運転技術に対するニーズと安全性のバランスを見極め、平均的なドライバーによる運転以上の安全性を確立できるよう、自動運転に対して慎重なアプローチをしている。
TRW は、自動運転の主要コンポーネントであるセンサー、コントローラ、アクチュエータ、マン・マシン・インターフェイスに関
し、長年にわたり実証済みの技術を有しており、安全を「知」の領域で制御するコグニティブ・セーフティシステムを提供している。
現在、センサー、コントローラ、アクチュエータ等の構成要素は、限定されたシナリオのみで作動する。反応速度は百ミリ秒単位で、視野は比較的狭く、道路状況確認は前方のみである。例えば、自動緊急ブレーキ(AEB)とアクティブレストレイント(拘束調整)システムは、事故発生の直前と衝突時に作動するが、自動運転下ではこうしたシナリオの適用条件が、「日常的な運転」にまで広げられるだろう。
自動運転に必要な技術の大部分は、すでにTRW が提供している技術を拡張したものである。安全性の向上を目的としたDAS センサーの搭載により、車両周辺の状況認識が向上し、ブレーキ、ハンドルのルーチン操作が可能となった。つまり、TRW のアクティブセーフティ( 予防安全)とパッシブセーフティ(乗員安全)システムが、日常的に利用される領域まで広がってきているのだ。
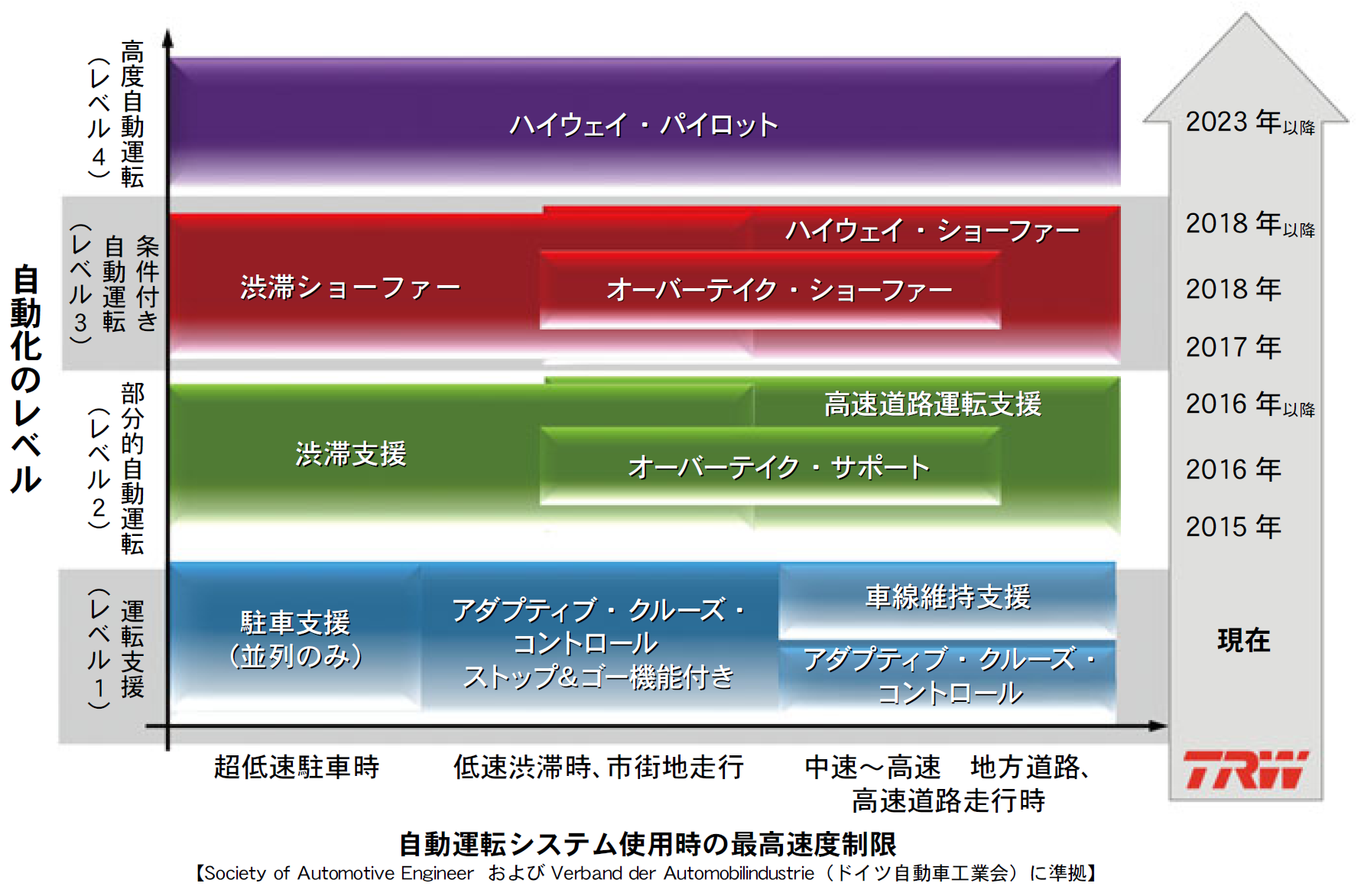
自動運転に向けたTRW のロードマップ
TRW は、自動運転へのロードマップをいくつかの自動化レベルに分けて定義している (図1)。TRW は、自動運転実現における最も大きな課題を、部分的自動運転システム(レベル2)から条件付き自動運転システム(レベル3)への移行にあると考えている。レベル2 システムではドライバーは車両の動きと周囲の道路状況を常に確認しなければならないが、レベル3 システムになると、ドライバーは少なくとも数秒の間、運転操作をしなくともよく、再度コントロールを取り戻すまでの間車両は自動で運転を継続することが可能となる。
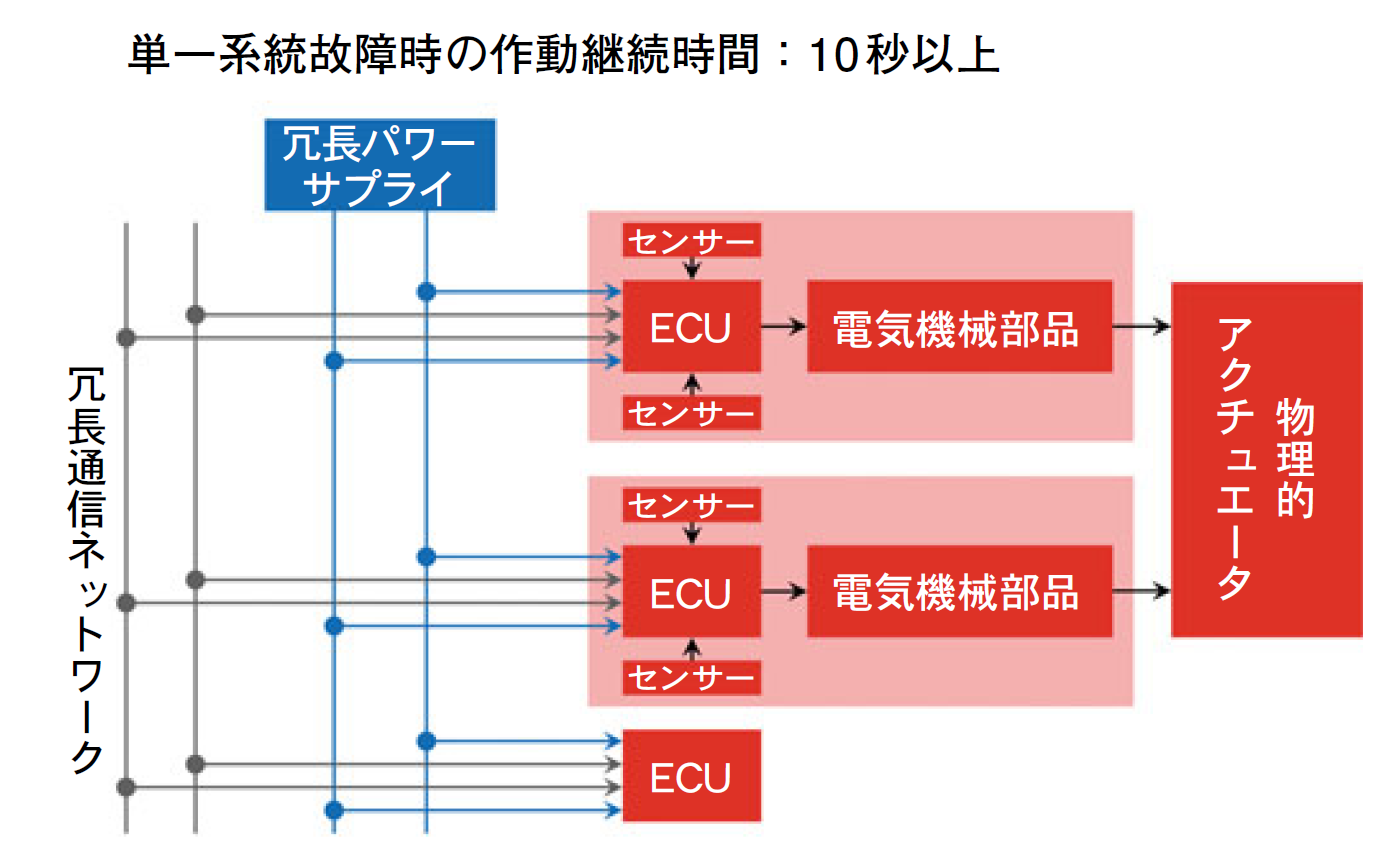
このレベルの自動運転下では、もはやドライバーは「バックアップ」システムとは見なされなくなるため、適切なコンポーネントに冗長性を持たせた車載システム構成が必要である(図2)。
|
|
|
さらに自動化レベルが上がると、車線変更や高速道路への出入り、交差点での通行の自動化など、より高度な機能を実現するために、車両の360 度全方位の環境の検知が不可欠となる。
現在、TRW では、高速道路や主要道路における自動運転(レベル2 およびレベル3)に注力している。
自動運転の主要技術
自動運転の実現には、その根幹となる技術が重要である。
● 車両周辺状況を検知するセンサー
● 車両の頭脳として機能する中央電子制御装置
○ 認識アルゴリズム
○ ナビゲーションシステム、車車間通信、路車間通信などの外部ソースからの情報
● 走行に必要な運転操作を実行するアクチュエータ
● ドライバーの注意を促し、車両の状況を伝えるマン・マシン・インターフェイス
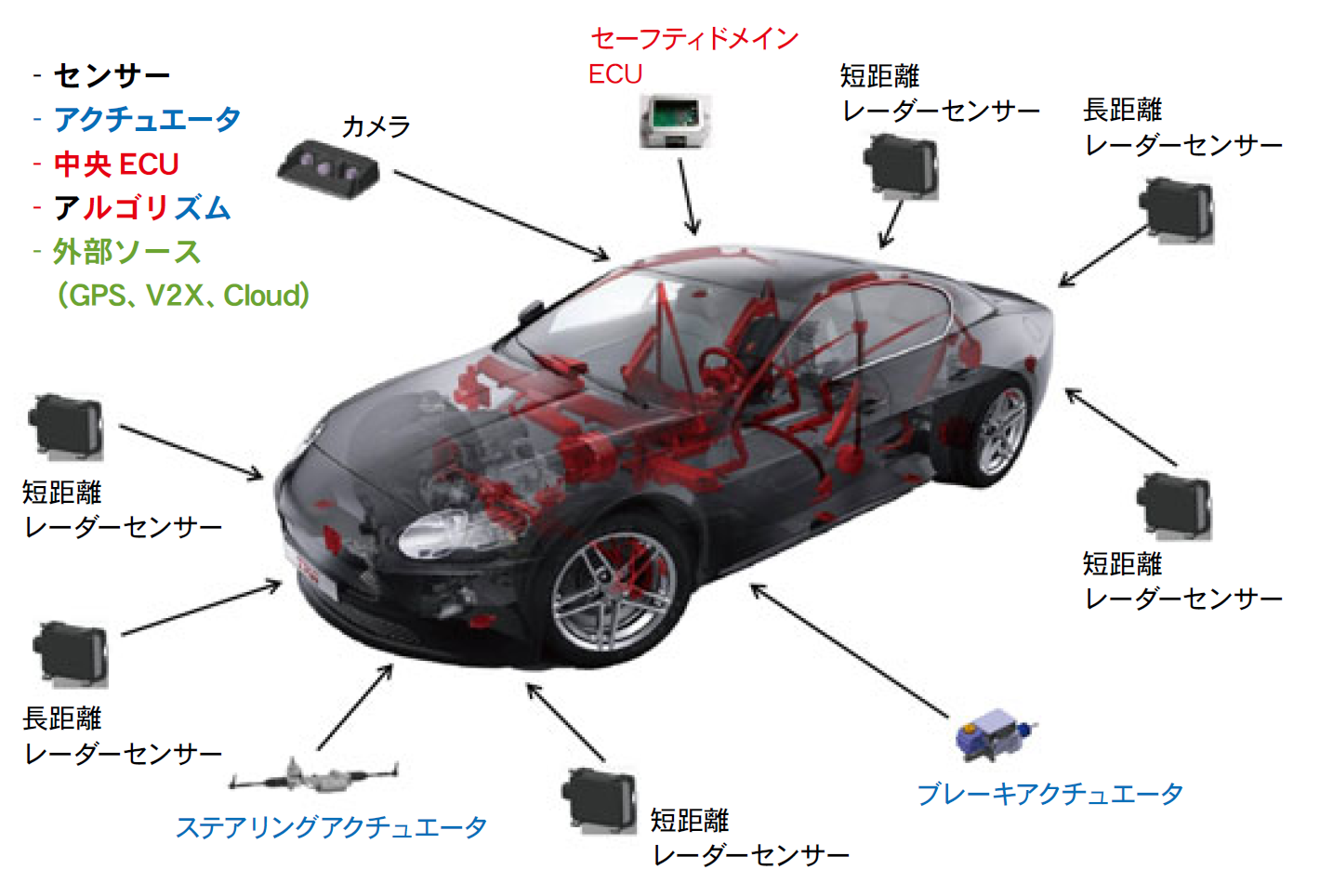
TRW は、自動運転の実現に必要なレーダーおよびカメラセンサー、セーフティドメインECU(SDE)、電動パワーステアリング (EPS)、横滑り防止装置(ESC)、ドライバー運転検知、センサー内蔵ステアリングなど、すべての主要コンポーネントとアルゴリズ ムを開発する能力を備えている(図3)。
|
|
自動運転の関連規制
1968 年に締結されたウィーン交通条約は、欧州における自動運転を厳しく制限している。同条約では、「すべてのドライバーは、常に車両を制御化に置くこと」を求めているが、その解釈は国によって異なる。このため、欧州では同条約を修正して欧州全域を網羅する法的枠組を作り出そうという試みが進められているが、すべての国を満足させることは難しいだろう。
ECE(欧州経済委員会)規則79 では、最高速度12 マイル/時(時速約19km)まではハンドル操作の自動化が認められている。これは半自動パーキングシステムには十分な要件であるが、渋滞時や高速道路の運転支援システムには不十分である。
また、カリフォルニア、フロリダ、ネバダ、ミシガンといった北米のいくつかの州では、すでに自動運転車両の使用が認可されている。基本的に米国運輸省高速道路交通安全局(NHTSA)は慎重なアプローチを採っており、試験走行や調査目的以外の公道での自動運転車両の使用を推奨してはいない。
日本においては、2013 年9 月に政府が高度運転支援技術を搭載した車両に対し、初めて自動車検査証とナンバープレートを発行し、公道における自動運転車の試験走行が公式に認められた。
今後に向けて
TRW は、世界中の数多くの自動車メーカーと連携し、自動運転の実用化に向けた取り組みを進めているが、依然として多くの課題も残されている。法制面の整備が必要とされる一方、自動車メーカーと自動車部品メーカーは、自動運転の主要技術と全方位を検知できる360 度センサーの開発において飛躍的な進歩を遂げている。そして、法規制とインフラ面の課題が解決した後、最終的には消費者の実際のニーズに対応する必要がある。消費者の期待に応え、自動運転への理解を促進し、その価値が広く認められるようにすることが今後の課題となるだろう。
TRW オートモーティブジャパン株式会社
http://www.trw.com
2015年5月1日発行
次世代自動車技術最前線2015より転載




