「カメラ・LiDARの弱点を補完する最新4Dレーダー解説 ― ロバスト性と冗長性の向上 」オンラインセミナー

自動車やバス、トラック、搬送ロボット等、自動運転技術のレベルを上げる際に重要なファクターとなるのがロバスト性の向上と冗長性の確保です。現在これらのシステムで主に使用されるカメラやLiDARは、雨天等に代表される悪天候で脆弱性を抱えており、場合によっては自動運転の継続が困難となる状況が想定されます。
このような観点から昨今4Dレーダーに注目が高まっている一方で、既存の4Dレーダーの多くは解像度の低さから、未だ有効な手段となり得ていないのが実情です。
Zadar社は世界最高峰の解像度を誇るレーダーと、卓越したソフト開発力により、このような課題を解決するソリューションを提案します。本ウェビナーでは、自動運転のロバスト性・冗長性確保を目指される方々に向け、一般的な4Dレーダーの技術紹介やZadar社の優位点、ソフトウェアソリューションの一例に加え、北米・欧州市場での4Dレーダー採用動向・事例などをご紹介します。
このような観点から昨今4Dレーダーに注目が高まっている一方で、既存の4Dレーダーの多くは解像度の低さから、未だ有効な手段となり得ていないのが実情です。
Zadar社は世界最高峰の解像度を誇るレーダーと、卓越したソフト開発力により、このような課題を解決するソリューションを提案します。本ウェビナーでは、自動運転のロバスト性・冗長性確保を目指される方々に向け、一般的な4Dレーダーの技術紹介やZadar社の優位点、ソフトウェアソリューションの一例に加え、北米・欧州市場での4Dレーダー採用動向・事例などをご紹介します。
こんな方におすすめ
- 自動運転/ADASシステムの開発に携わるエンジニア、研究者の方
- 搬送ロボット、建機・農機自動化の分野で、カメラやLiDARによる検知システムで荒天時の検知感度に課題を感じている方
- 既存の4Dレーダーの解像度に課題を持っている方
セミナー概要
セミナープログラム
▪︎4Dレーダーの基礎 (従来の3Dレーダーとの違い)
▪︎他のセンサソリューションとの比較 (カメラ、LiDAR)
▪︎Zadar社の技術紹介
・HW性能、SW例(オブジェクトトラッキング、クラシフィケーション、SLAM、他)
▪︎北米・欧州市場での4Dレーダーの搭載状況・採用事例紹介
▪︎Q&Aセッション
※内容は、予告なく変更される場合がございます。
ゼイダー社(Zadar Labs)について
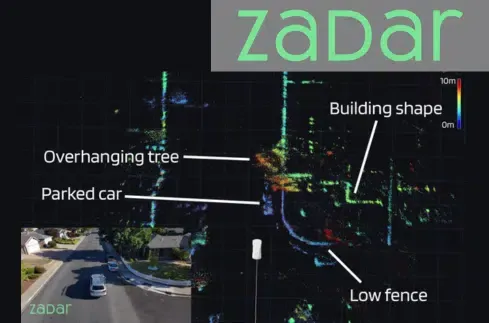
Zadar社は2019年創業の超高性能なSoftware Defined 4D Imaging Radarを開発する米国企業です。
現在多数の企業が4Dレーダーの開発に乗り出していますが、Zadar社の技術は他社を圧倒する解像度や長距離測距を実現しています。
またソフトウェアの開発にも力を入れており、カメラ+レーダーフュージョンやSLAM (Simultaneous Localization And Mapping: 自己位置認識・環境地図作成) 、レーダーオドメトリといった自動運転・自律走行を想定した機能から、ITSや監視用途で定点に設置した想定でのオブジェクトトラッキング・クラシフィケーション機能など、様々な機能をご提案することが可能です。
zPRIMEによる1,000m先の車両検知
セミナー講師
-

- 堀内哲平 氏
- コーンズテクノロジー(Zadar Labs社 国内代理店) Product Manager
開催概要
- 主催
- コーンズ テクノロジー株式会社(Zadar Labs社 国内代理店)
- 開催日時
- 2025年12月17日 14:00 - 15:00
- 開催場所
- オンライン開催
- 受講料
- 無料
このセミナーは終了しました
このセミナーは終了しました